Projects
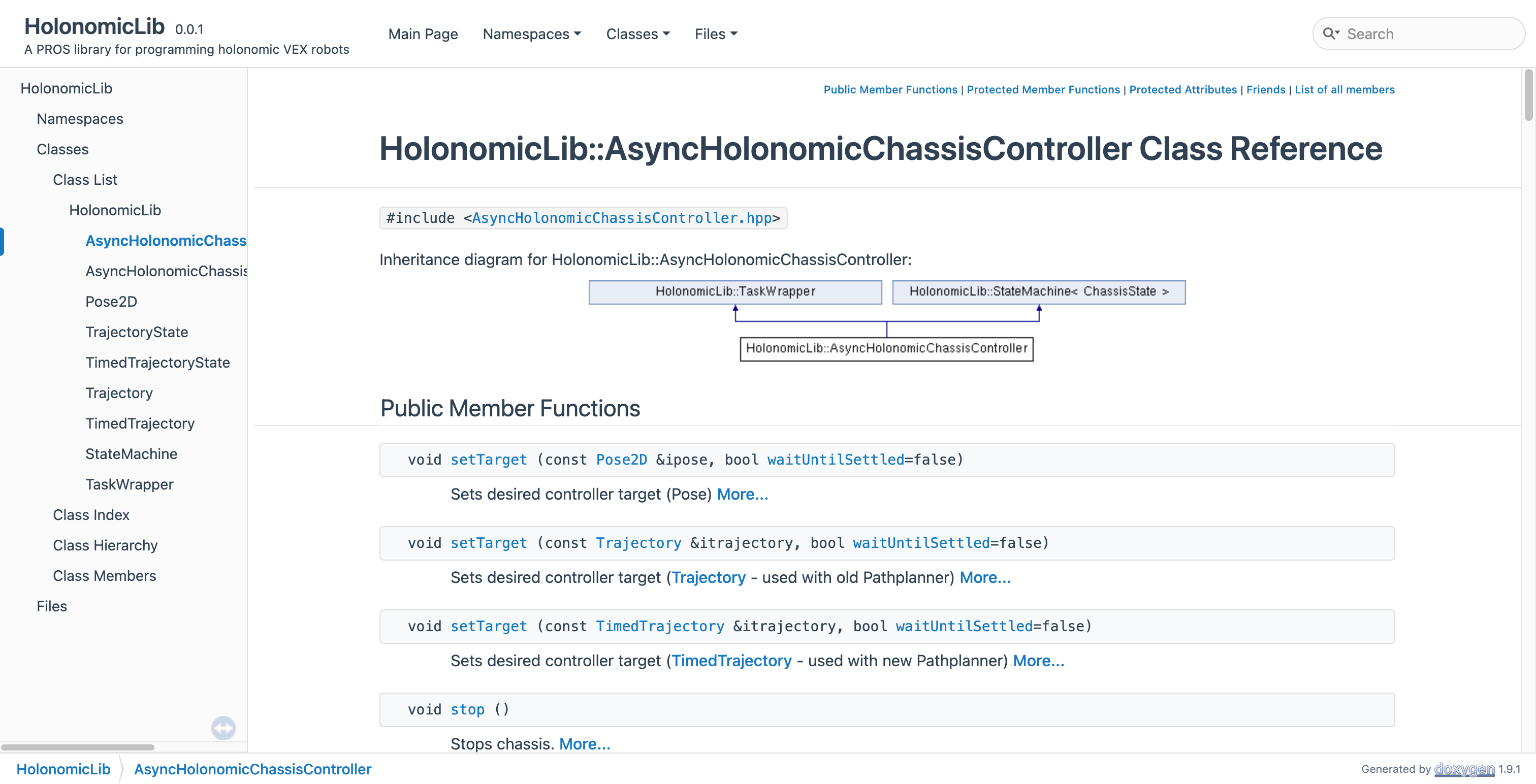
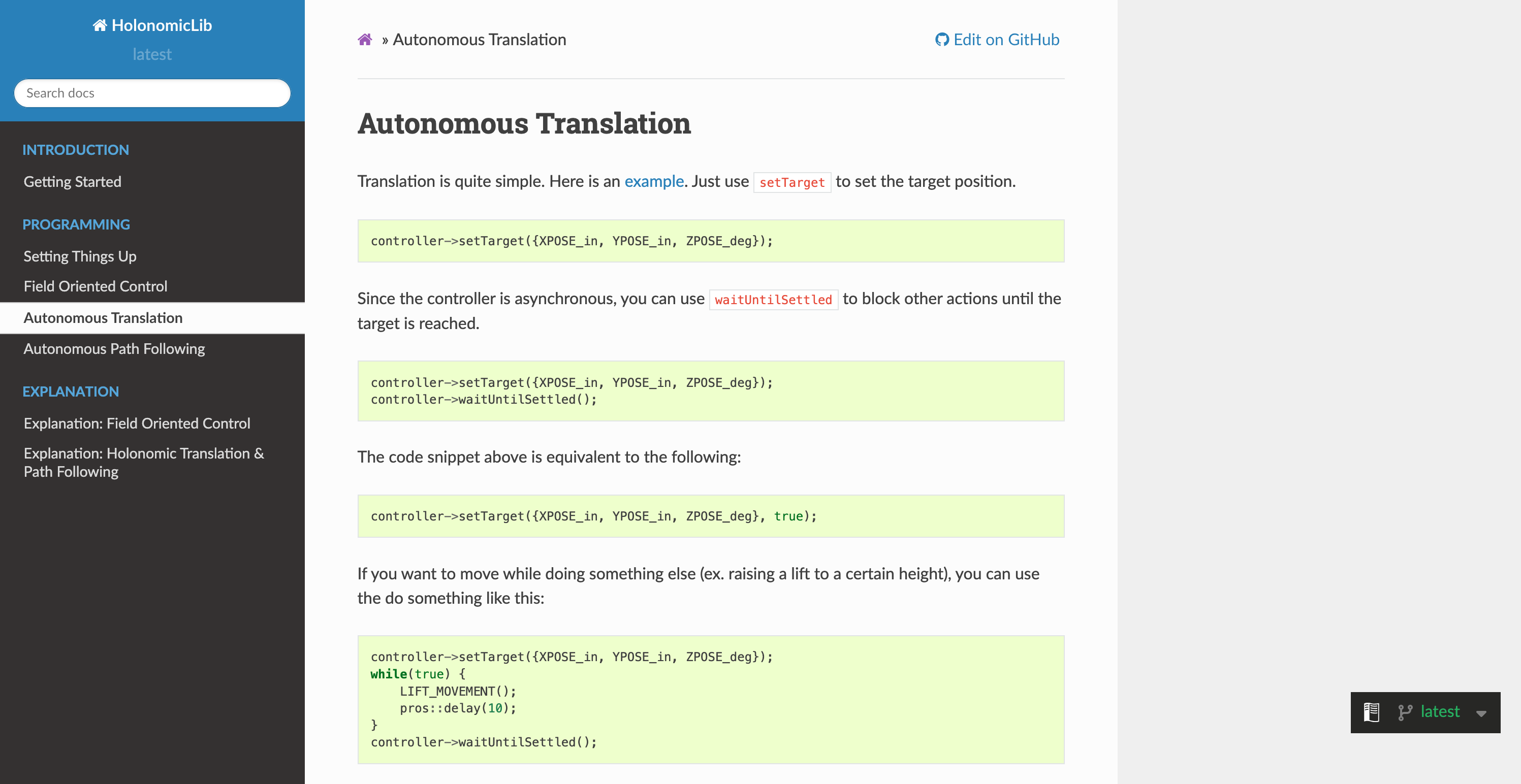
HolonomicLib: A C++ motion planning library for holonomic drives.
Example 1: Spline Translation (with changing heading)
Example 2: Spline Translation (no change in heading)
The full videos can be found here and here.
The library includes detailed API documentation along with step-by-step guides for getting started.
On-the-fly Path Generation
Generates motion profiles based on spline paths at any location on the field. Generated paths avoid “no-go” zones where the robot cannot be (i.e. the white platform).
.gif)
The full video can be found here.
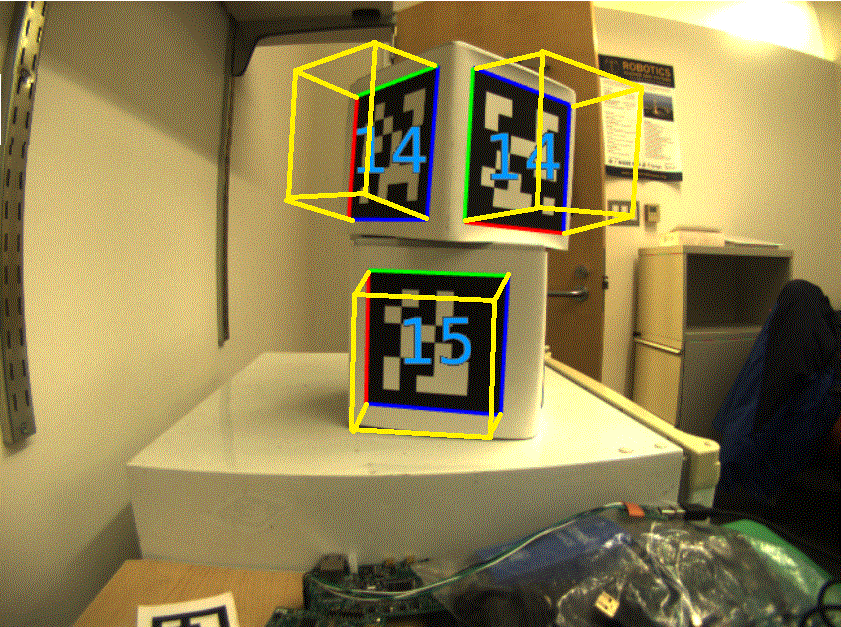
Sensor Fusion Localization
Combines dead-reckoning with AprilTag-based visual odometry using a Kalman filter.
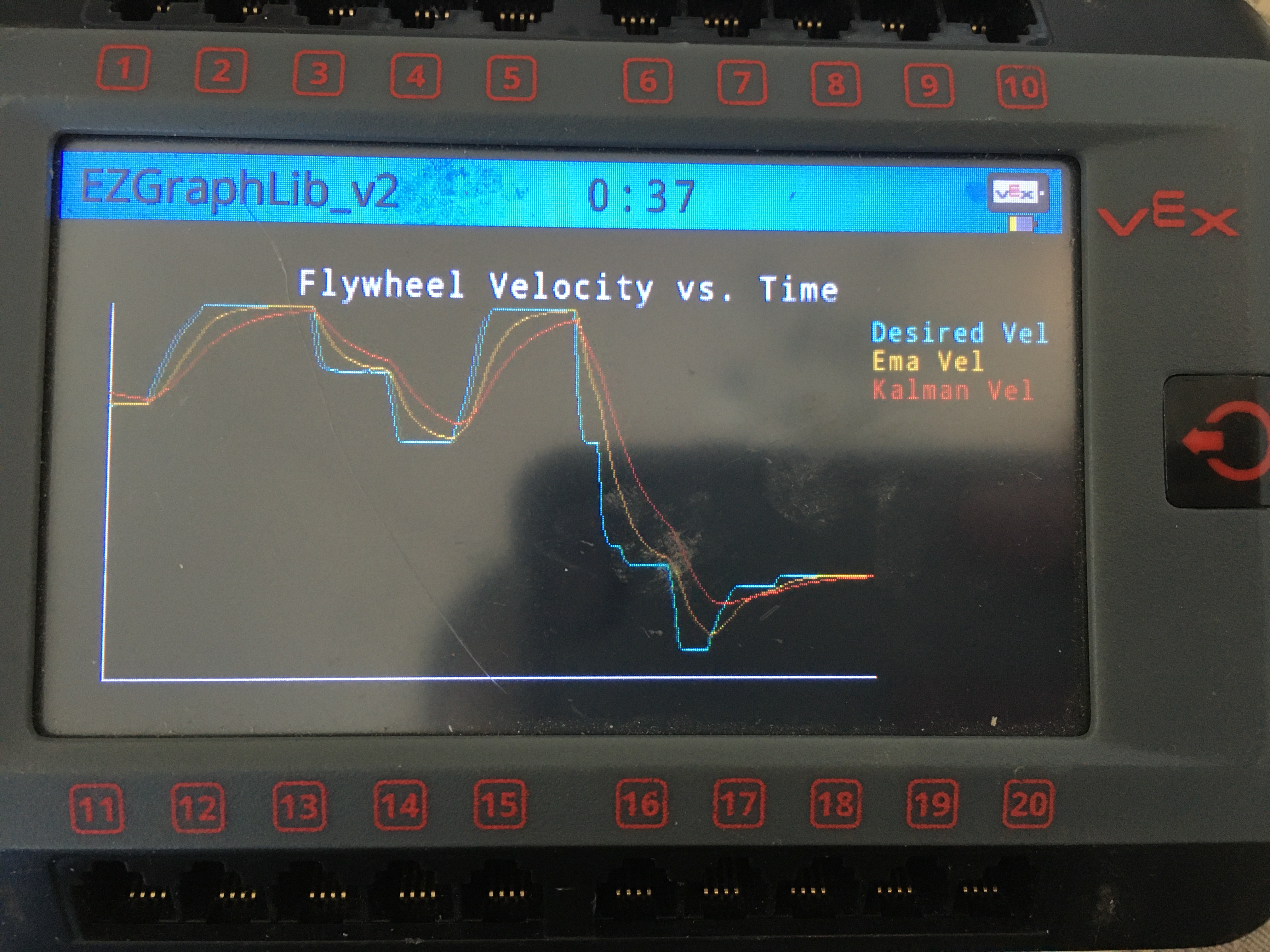
Graphy: A C++ graphing library for robotics.
Features a simple graphing interface for data visualization.
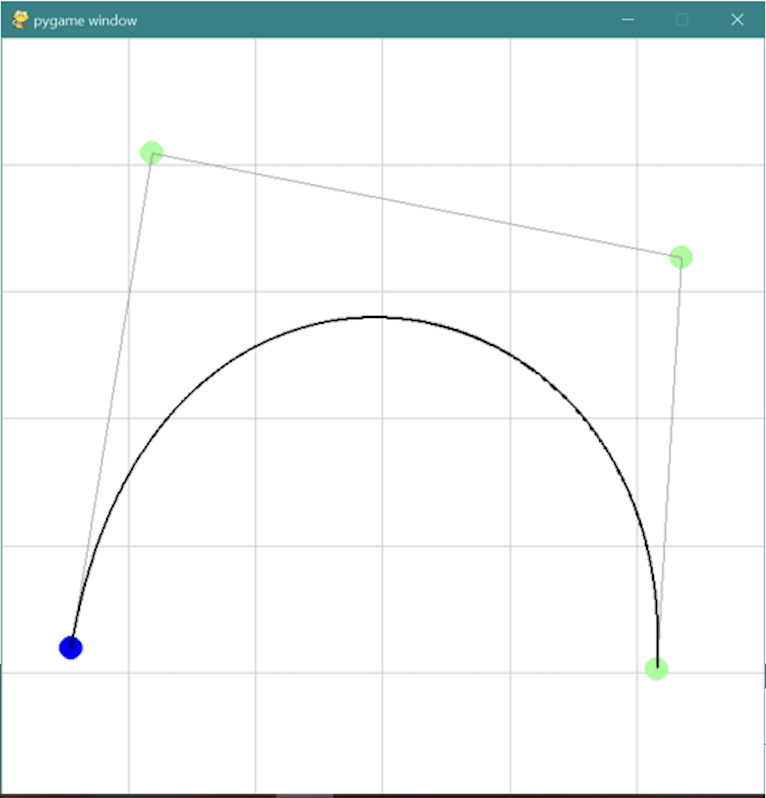
Bezier Curve Visualizer/Generator
Generates constants for bezier curves. Built with pygame.
Bilingual Audiobook App for Aesop Fables
Created with Android Studio.